
Układ napędowy trolejbusu służy do realizacji procesu przemieszczenia. Wymagania stawiane wobec niego to zapewnienie odpowiednich przyspieszeń rozruchu i hamowania oraz niezawodna praca. Mniej istotne, choć również ważne wymagania, to oszczędność energii, cicha praca i niska emisja wibracji. Podstawowymi elementami układu napędowego są silnik oraz układ przeniesienia napędu. Silnik przetwarza dostarczoną z sieci trakcyjnej energię elektryczną na energię ruchu obrotowego, zaś układ przeniesienia napędu doprowadza napęd do kół. Pomiędzy silnikiem a odbierakami prądu z sieci trakcyjnej występują urządzenia przetwarzające energię elektryczną, tak aby umożliwić poprawny rozruch i hamowanie trolejbusu. Pierwotnie zadanie to spełniały łączniki oraz oporniki, współcześnie stosowane są przekształtniki, stanowiące zaawansowane elementy sterowania.
Elementem, który ma największy wpływ na parametry układu napędowego jest silnik. Klasyfikację silników stosowanych w trolejbusach zaprezentowano poniżej.
Rys.1 Klasyfikacja silników stosowanych w trolejbusach
Najstarszymi maszynami elektrycznymi stosowanymi w trakcji elektrycznej były silniki szeregowe prądu stałego. Ich duży moment obrotowy i stosunkowo prosta budowa pozwoliły na uzyskanie niezawodnego napędu. Wykorzystywano je od początków rozwoju trolejbusów w latach 20-tych aż do lat 80-tych XX wieku. W międzyczasie podejmowano próby konstruowania silników szeregowo-bocznikowych, umożliwiających potencjalnie oszczędność energii oraz hamowanie odzyskowe. Oszczędności okazały się jednak niewielkie, a same silniki droższe w produkcji, i większość z firm produkujących trolejbusy zrezygnowała z ich stosowania na rzecz silników szeregowych. Mimo to, zostały one zastosowane w bazowej wersji popularnego radzieckiego trolejbusu ZIU 9, a także w polskim trolejbusie z KPNA Słupsk typu Jelcz PR110E.
Zupełne inne rozwiązanie techniczne stanowią silniki asynchroniczne prądu zmiennego. Charakteryzuje je prostsza niż silniki prądu stałego budowa oraz mniejsza masa przy tej samej mocy, dzięki czemu są tańsze w eksploatacji. Do ich sterowania potrzebne były jednak zaawansowane przekształtniki. Pierwsze takie urządzenia dla trakcji trolejbusowej zbudowano pod koniec lat 70-tych, i od tamtej pory zaczęły się one upowszechniać, wypierając z rynku rozwiązania z silnikami szeregowymi prądu stałego.
Zupełne inne rozwiązanie techniczne stanowią silniki asynchroniczne prądu zmiennego. Charakteryzuje je prostsza niż silniki prądu stałego budowa oraz mniejsza masa przy tej samej mocy, dzięki czemu są tańsze w eksploatacji. Do ich sterowania potrzebne były jednak zaawansowane przekształtniki. Pierwsze takie urządzenia dla trakcji trolejbusowej zbudowano pod koniec lat 70-tych, i od tamtej pory zaczęły się one upowszechniać, wypierając z rynku rozwiązania z silnikami szeregowymi prądu stałego.
Silniki synchroniczne, z magnesami trwałymi w wirniku to konstrukcje godne uwagi z racji na niską masę i objętość w stosunku do osiąganej mocy. Możliwe jest ich zamocowanie w piastach kół, co znacząco zmniejsza gabaryty całego układu napędowego. Barierą w ich powszechnym zastosowaniu jest jednak wysoka cena. O ile więc większość europejskich producentów decyduje się na stosowanie silników asynchronicznych (Skoda, Solaris, Hess) to niektórzy oferują trolejbusy z silnikami synchronicznymi (Irisbus Cristalis).
PODSTAWOWE ELEMENTY OBWODÓW GŁÓWNYCH TROLEJBUSÓW:
PODSTAWOWE ELEMENTY OBWODÓW GŁÓWNYCH TROLEJBUSÓW:
| Symbol graficzny |
Symbol literowy |
Nazwa | Właściwości |
| S | stycznik | Jest to element pełniący rolę wyłącznika dla danej części obwodu. Stycznik moze być włączony (zwarty) lub wyłączony (rozwarty). | |
| R | rezystor (opornik) |
Element przewodzący posiadający duży opór, służący do wytracania energii i obniżania napięcia. Opór w elektryce to przeciwstawianie się przepływowi prądu. | |
| L | cewka indukcyjna |
Zwinięty w walcowaty kształt przewodnik, służący do wytwarzania pola magnetycznego. Z cewek składa się uzwojenie stojana (części nieruchomej) silników prądu stałego i zmiennego. | |
| D | dioda | Element półprzewodnikowy, dwukońcówkowy. Dioda dla jednego kierunku przepływu prądu jest przewodnikiem, zaś dla przeciwnego - izolatorem. Dioda jest więc elementem umożliwającym przepływ prądu tylko w jedną stronę, zgodnie ze swoją polaryzacją. | |
| Tr | tyrystor | Sterowany element półprzewodnikowy. Tyrystor może przewodzić prąd lub blokować jego przepływ. Uruchomienie tyrystora, czyli rozpoczęcie przewodzenia, jest możliwe za pomocą podania dodatniego impulsu elektrycznego na bramkę. | |
| T | tranzystor | Sterowany element półprzewodnikowy. Tranzystor może przewodzić prąd lub blokować jego przepływ. Uruchomienie tranzystora, czyli rozpoczęcie przewodzenia, jest możliwe za pomocą podania dodatniego impulsu elektrycznego na bramkę. Wyłączenie tranzystora realizowane jest za pomocą podania ujemnego impulsu. Tranzystory cechuje wyższa dopuszczalna częstotliwość pracy niż tyrystory, większa sprawność oraz niższa masa dla całego układu sterowania opartego na tranzystorach. | |
 |
S | silnik prądu stałego |
Maszyna elektryczna przetwarzająca energię elektryczną na energię mechaniczną, zasilana prądem stałym. Symbol oznacza wirnik z komutatorem. |
 |
M 3~ | silnik asynchroniczny trójfazowy |
Maszyna elektryczna przetwarzająca energię elektryczną na energię mechaniczną, zasilana trójfazowym prądem zmiennym. |
Tab.1 Podstawowe elementy obwodów głównych trolejbusów
UKŁADY STEROWANIA
Kwestią decydującą o charakterystyce i osiągach trolejbusu jest zastosowane w nim sterowanie. Opisane zostaną 3 rodzaje układów sterowania trolejbusów:
UKŁADY STEROWANIA
Kwestią decydującą o charakterystyce i osiągach trolejbusu jest zastosowane w nim sterowanie. Opisane zostaną 3 rodzaje układów sterowania trolejbusów:
Godnym uwagi jest fakt, iż tylko trzeci układ jest stosowany we współczesnych pojazdach trakcji elektrycznej.
1. Układ oporowo-stycznikowy z silnikiem prądu stałego
Układ ten steruje pracą silnika prądu stałego za pomocą łączenia stycznikami oporników w odpowiednią kombinację. Generalna zasada jest taka, iż na początku rozruchu włączona jest duża ilość oporników, później zaś, w miarę wzrostu prędkości pojazdu, są one stopniowo odłączane, aż do przejścia na zasilane bezpośrednie z sieci. Największą wadą tego sterowania jest występowanie strat mocy w opornikach.
Rys.2 Schemat blokowy układu oporowo-stycznikowego
Na powyższym schemacie przedstawiono podstawowe elementy układu. Prąd poprzez odbierak połączony z przewodem dodatnim płynie przewodami do filtru sieciowego, zmniejszającego wahania napięcia zasilającego. Pomimo znamionowej wartości napięcia równej 600 voltów, w sieci zasilającej występują jego znaczne odchylenia, nawet +/- 150 V. Napięcie może ulegać nagłym spadkom, gdy na danym odcinku zasilającym rusza kilka trolejbusów jednocześnie. Filtr sieciowy chroni przed negatywnym wpływem tych zjawisk. Następnym elementem na drodze prądu są styczniki i oporniki (rezystory). Styczniki są elementami służącymi do łączenia i rozłączania części obwodu, tak aby zmienić jego konfigurację. Rezystory są elementami pełniącymi dwie funkcje - pierwsza to obniżenie napięcia przy rozruchu, druga - wytracanie energii hamowania. Po przejściu przez układ złożony ze styczników i oporników prąd trafia do silnika i zasila jego uzwojenia, a następnie wraca przewodem ujemnym przez odbierak do drugiego przewodu sieci trakcyjnej. Urządzenia sterujące pośredniczą pomiędzy pedałami sterowniczymi i przyciskami w kabinie kierowcy a układem styczników i oporników.
Rys.3 Schemat ogólny trolebusu ze sterowaniem oporowo-stycznikowym
1- przetwornica, 2- oporniki rozruchowe, 3- odbieraki prądu, 4- PSR (przekaźnik samoczynnego rozruchu), 5- SET (elektryczny sterownik rozruchu), 6- styczniki, 7- silnik, 8- wał napędowy, 9- most napędowy
Najczęściej stosowany w tym układzie jest silnik szeregowy. Przez tą nazwę rozumie się silnik zasilany prądem stałym o szeregowym połączeniu uzwojenia i wirnika. Rys. 2 przedstawia silnik w ujęciu modelowym. Silnik elektryczny składa się z części nieruchomej - stojana (5 i 6) - i ruchomej - wirnika (8) połączonego z komutatorem (3). Stojan stanowi uzwojenie silnika, które jest wykorzystywane do wytworzenia pola magnetycznego (7), zwanego też polem wzbudzenia. Wirnik o kształcie ramki jest umieszczony w polu magnetycznym stojana. Do zacisków wirnika jest doprowadzany poprzez komutator prąd stały. Komutator (3) to wielosegmentowy pierścień, do którego są dociśnięte szczotki węglowe (2). Służy on do zmiany zwrotu natężenia prądu w wirniku po wykonaniu przez niego obrotu, co umożliwia kontynuację ruchu obrotowego. Dzieje się to za sprawą podłączenia dodatniego źródła zasilania z drugim segmentem komutatora. Gdyby nie było komutatora, wirnik zatrzymałby się w pozycji pionowej. Wirnik jest przewodnikiem z płynącym prądem (4), umieszczonym w polu magnetycznym, stąd też działa na niego siła elektrodynamiczna (10), wytwarzająca moment obrotowy i powodująca jego obrót (9). Ruch wirnika jest wyprowadzany na wał napędowy, który napędza most napędowy, a w rezultacie koła trolejbusu.
Rys.4 Silnik prądu stałego - schemat ideowy
1- kierunek prądu, 2- szczotka węglowa, 3- komutator, 4- kierunek prądu w wirniku, 5- biegun północny pola magnetycznego wytwarzanego przez uzwojenie, 6- biegun południowy pola magnetycznego wytwarzanego przez uzwojenie, 7- linie pola magnetycznego, 8- wirnik, 9- kierunek obrotu wirnika, 10- siła elektrodynamiczna
Rys. 4 przedstawia silnik prądu stałego jedynie modelowo. W praktyce wirnik to kilkadziesiąt ramek, umieszczonych współosiowo. Są one mocowane do wielosegmentowego komutatora, przy czym każdy segment zasila jedną ramkę. Uzwojenie stojana wykonuje się ze zwiniętych w pęk cienkich przewodów miedzianych. Całość mocuje się w obudowie, zapewniającej izolację elektryczną od otoczenia.
Moc uzyskiwana z silnika elektrycznego jest ograniczona przez jego nagrzewanie się. Bezpośrednim skutkiem przepływu prądu przez przewodnik jest wytwarzanie się ciepła, którego ilość zależy od rezystancji (oporu) przewodnika. Wzrost temperatury silnika wynika więc ze strat energii w rezystancji elementów przewodzących. Od natężenia prądu przepływającego przez uzwojenia silnika będzie też zależał stopień jego nagrzewania się.
Rys.5 Ogólny schemat obwodu głównego trolejbusu ze sterowaniem oporowo-stycznikowym
SL- stycznik liniowy, S1, S2, S3- styczniki rozruchowe, R1, R2, R3- oporniki rozruchowe, L- uzwojenie stojana,
S- wirnik z komutatorem
S- wirnik z komutatorem
Rozróżnia się wartości chwilowe i znamionowe natężenia. Wartości znamionowe natężenia to takie, do których silnik jest przeznaczony i przy których może pracować bez przerwy, nie ryzykując uszkodzenia uzwojeń. Wartości chwilowe to takie, które występują tylko przez krótki okres pracy (np. rozruch). Analogiczna sytuacja dotyczy prądu, napięcia i mocy. Moc chwilowa silnika prądu stałego przy rozruchu przekracza wartość znamionową nawet dwukrotnie. Sprawia to, iż silnik elektryczny jest szczególnie dobrze dostosowany do pracy przy dużych obciążeniach (np. przy pokonywaniu wzniesień).
Rys.6 Schemat obwodu głównego trolejbusu ze sterowaniem oporowo-stycznikowym w trakcie rozruchu. Na szaro oznaczono elementy układu wykorzystywane podczas hamowania
Prąd płynie od przewodu dodatniego przez odbierak, następnie przepływa przez rezystory (R1-R3) i uzwojenie stojana (L) - wytwarzające pole magnetyczne, a później przez wirnik, w którym za sprawą oddziaływania na niego pola magnetycznego stojana powstaje moment obrotowy. Prąd płynie następnie do odbieraka i do przewodu ujemnego sieci trakcyjnej
Najistotniejszym procesem dotyczącym silnika elektrycznego jest jego rozruch. Gdyby podłączyć silnik od razu do napięcia sieci (napięcia znamionowego, 600V), popłynąłby prąd o natężeniu kilkukrotnie przekraczającym wartość dopuszczalną, co skutkowałoby uszkodzeniem uzwojeń. Rozruch silnika elektrycznego wiąże się więc z koniecznością obniżenia wartości doprowadzonego napięcia.
Najprostszym technologicznie rozwiązaniem jest zastosowanie oporników rozruchowych (Fot.1). Oporniki włącza się do obwodu silnika szeregowo, co stwarza duży opór dla przepływu prądu. Pozwala to na obniżenie napięcia na zaciskach twornika, kosztem mocy utraconej na wytwarzających ciepło opornikach. Podczas załączania następnych stopni rozruchu, kolejne oporniki są bocznikowane przez styczniki (przepływający prąd 'omija' oporniki), dzięki czemu opór w obwodzie maleje, a napięcie wzrasta. Prędkość obrotowa wirnika wzrasta. Przez kolejne stopnie dochodzi się aż do pozycji bezoporowej, w której wszystkie oporniki są odłączone, a silnik pracuje pod napięciem znamionowym. Dalszy wzrost prędkości obrotowej silnika jest możliwy przez zmniejszenie pola wzbudzenia (zmniejszenie wartości natężenia pola magnetycznego, wytwarzanego przez uzwojenie silnika), co realizuje się przez bocznikowanie uzwojenia.
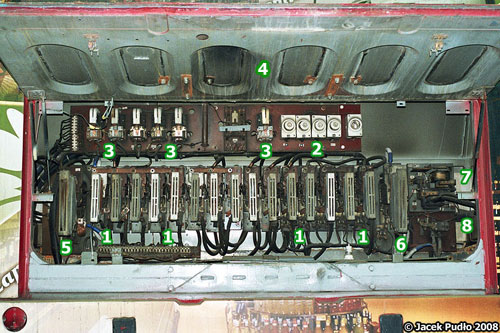
Fot.1 Oporowy układ rozruchowy w trolejbusie PR110E - widok na komorę styczników
1 - styczniki wielkoprądowe (powyżej 200A), 2- bezpieczniki ogrzewania, silnikow pomocniczych i wzbudzenia bocznikowego silnika trakcyjnego, 3- styczniki małoprądowe obwodów 600V, do obwodów ogrzewania, silników pomocniczych i wzbudzenia bocznikowego silnika trakcyjnego, 4- uniesiona klapa komory styczników, 5 i 6 - ST1 i ST2 - styczniki liniowe załączające silnik trakcyjny, 7 - PSR (przekaźnik samoczynnego rozruchu), 8 - PZU (przekaźnik zanikowo napięciowy)
Na poniższej ilustracji przedstawiono obwód, w którym przepływa prąd w trakcie hamowania elektrodynamicznego trolejbusu.
Rys.7 Schemat obwodu głównego trolejbusu ze sterowaniem oporowo-stycznikowym w trakcie hamowania. Na szaro oznaczono elementy układu wykorzystywane podczas rozruchu
Prąd płynie przez wirnik w kierunku przeciwnym niż dla rozruchu, za sprawą zamiany przewodów wejściowych i wyjściowych z wirnika za pomocą styczników nawracających (SN), następnie przepływa przez rezystor hamowania (RH), zamknięty stycznik hamowania (SH) i uzwojenie stojana. Ponieważ kierunek pola magnetycznego jest przeciwny do kierunku przepływu prądu przez wirnik w trakcie rozruchu, powstaje ujemny moment obrotowy i silnik zaczyna hamować
W wypadku tego układu występuje konieczność stosowania ciężkich, wielkogabarytowych oporników i dużej ilości przekaźników oraz łączników. Dodatkowo, w trakcie rozruchu powstają na opornikach straty mocy, proporcjonalne do kwadratu natężenia przepływającego przez nie prądu pomnożonego przez wartość oporu. Straty te bezpośrednio przekładają się na zużycie prądu. Stąd też w miarę postępu technologicznego dążono do rozwiązań, które umożliwiłyby obniżenie napięcia bez konieczności stosowania oporników. Sterowanie opornikowe występuje w trolejbusach takich jak Skoda 8Tr, ZIU 9, Jelcz PR110E (ten posiada jednak nieco inne rozwiązania sterowania z racji na silnik szeregowo-bocznikowy).

W wypadku tego układu występuje konieczność stosowania ciężkich, wielkogabarytowych oporników i dużej ilości przekaźników oraz łączników. Dodatkowo, w trakcie rozruchu powstają na opornikach straty mocy, proporcjonalne do kwadratu natężenia przepływającego przez nie prądu pomnożonego przez wartość oporu. Straty te bezpośrednio przekładają się na zużycie prądu. Stąd też w miarę postępu technologicznego dążono do rozwiązań, które umożliwiłyby obniżenie napięcia bez konieczności stosowania oporników. Sterowanie opornikowe występuje w trolejbusach takich jak Skoda 8Tr, ZIU 9, Jelcz PR110E (ten posiada jednak nieco inne rozwiązania sterowania z racji na silnik szeregowo-bocznikowy).

Fot.2 Jelcze PR110E (#761 i #748 MPK Lublin) - trolejbusy ze sterowaniem opornikowym
Układ ten steruje pracą silnika prądu stałego za pomocą przerywacza prądu (choppera) zbudowanego z tranzystorów lub tyrystorów. Przerywacz umieszcza się na przewodzie prowadzącym do silnika. W trakcie pracy przerywacz zamyka się na krótko, zwierając obwód i przewodząc prąd, po czym otwiera, blokując przepływ. Ta prosta sekwencja pozwala na obniżenie napięcia. Im dłużej trwa zamknięcie przerywacza w stosunku do otwarcia, tym większe napięcie będzie doprowadzone do silnika.
Na początku rozruchu przerywacz przewodzi prąd przez krótką część okresu impulsowania (okres ten to suma czasu zamknięcia o otwarcia przerywacza), później zaś czas przewodzenia wzrasta aż do pełnego przewodzenia (przerywacz nie jest wyłączany i prąd w obwodzie płynie cały czas). Układ ten realizuje rozruch bez strat mocy na opornikach.
Rys.8 Ogólny schemat obwodu głównego trolejbusu ze sterowaniem impulsowym
SL - stycznik liniowy, T1 - tyrystor, L - uzwojenie stojana, S - wirnik silnika z komutatorem, D - dioda, Ld - dławik
Rozruch impulsowy realizuje się za pomocą zastosowania w układzie rozruchowym przerywacza (na Rys.8 jego funkcję pełni tyrystor T1), który zmniejsza wartość napięcia doprowadzonego do silnika (S). Przerywacz jest cyklicznie włączany i wyłączany, z częstotliwością rzędu kilkuset herzów. Po zamknięciu przerywacza (T1) przez krótki czas silnik (L i S) zasilany jest bezpośrednio z sieci zasilającej. Natężenie przepływu prądu zaczyna narastać. Po chwili przerywacz jest otwierany, silnik jest odłączany od sieci zasilającej, a przepływ napięcia w silniku jest podtrzymywany przez diodę (D). Później przerywacz jest ponownie zamykany i sekwencja realizuje się od nowa. W rezultacie, na silniku występuje obniżone napięcie. Jego wielkość zależy od tego, jak długi był czas zamknięcia przerywacza w stosunku do czasu otwarcia (czyli czasu w którym przewodził prąd do czasu w którym nie przewodził prądu).
Działanie przerywacza ilustrują poniższe wykresy.
Rozruch impulsowy realizuje się za pomocą zastosowania w układzie rozruchowym przerywacza (na Rys.8 jego funkcję pełni tyrystor T1), który zmniejsza wartość napięcia doprowadzonego do silnika (S). Przerywacz jest cyklicznie włączany i wyłączany, z częstotliwością rzędu kilkuset herzów. Po zamknięciu przerywacza (T1) przez krótki czas silnik (L i S) zasilany jest bezpośrednio z sieci zasilającej. Natężenie przepływu prądu zaczyna narastać. Po chwili przerywacz jest otwierany, silnik jest odłączany od sieci zasilającej, a przepływ napięcia w silniku jest podtrzymywany przez diodę (D). Później przerywacz jest ponownie zamykany i sekwencja realizuje się od nowa. W rezultacie, na silniku występuje obniżone napięcie. Jego wielkość zależy od tego, jak długi był czas zamknięcia przerywacza w stosunku do czasu otwarcia (czyli czasu w którym przewodził prąd do czasu w którym nie przewodził prądu).
Działanie przerywacza ilustrują poniższe wykresy.
Rys.9 Wykres napięcia na przerywaczu
Na zielono oznaczono napięcie na przerywaczu. tz to czas, w którym przerywacz był zamknięty i przewodził prąd. to to czas, w którym przerywacz był otwarty i nie przewodził prądu.T to czas impulsowania, czyli odstęp czasowy pomiędzy kolejnymi impulsami zamykającymi przerywacz. Dla długiego okresu czasu wartość średnia napięcia będzie dla tz=to równe połowie napięcia sieci. Wartość średnią napięcia oznaczono jako U sr.
Rys.10 Wykres prądu na silniku
Oznaczenia tz i to mają taknie znaczenie, jak dla Rys.9. W trakcie czasu zamknięcia przerywacza prąd narasta (czarna linia), a podczas czasu otwarcia - przepływa przez diodę silnika i stopniowo maleje. Wartość średnią prądu na silniku oznaczono szarą linią przerywaną.
Podstawową zaletą sterowania impulsowego jest brak rezystorów, co umożliwia rozruch bez strat mocy. Rozpędzanie się w systemie z przerywaczem jest jednocześnie płynniejsze (nie występują szarpnięcia przy wyłączaniu rezystorów z obwodu). Zakres regulacji wartości przyspieszeń jest znacznie szerszy. Początkowo stosowane były tyrystory klasyczne SCR, jednakże ich wyłączanie było utrudnione, wymagało bowiem skomplikowanych układów komutacyjnych i zamontowania specjalnych tyrystorów załączających. Dalszy rozwój technologii pozwolił na wykorzystanie tyrystorów GTO (Gate Turn-Off - tyrystory wyłączane prądem bramki - w ich wypadku podanie impulsu dodatniego na bramkę uruchamiało tyrystor - rozpoczynało przewodzenie, zaś podanie impulsu ujemnego - wyłączało tyrystor). Układy z tymi tyrystorami były lżejsze niż wcześniej stosowane. Dalszy rozwój energoelektryki umożliwił stosowanie tranzystorów dużej mocy. Są to tranzystory z izolowaną bramką (IGBT - Insulated Gate Bipolar Transistor). Układy z tymi tranzystorami charakteryzuje najmniejsza masa, jednocześnie występują mniejsze straty łączeniowe, a także dopuszczalne są wyższe częstotliwości pracy.
Podstawową zaletą sterowania impulsowego jest brak rezystorów, co umożliwia rozruch bez strat mocy. Rozpędzanie się w systemie z przerywaczem jest jednocześnie płynniejsze (nie występują szarpnięcia przy wyłączaniu rezystorów z obwodu). Zakres regulacji wartości przyspieszeń jest znacznie szerszy. Początkowo stosowane były tyrystory klasyczne SCR, jednakże ich wyłączanie było utrudnione, wymagało bowiem skomplikowanych układów komutacyjnych i zamontowania specjalnych tyrystorów załączających. Dalszy rozwój technologii pozwolił na wykorzystanie tyrystorów GTO (Gate Turn-Off - tyrystory wyłączane prądem bramki - w ich wypadku podanie impulsu dodatniego na bramkę uruchamiało tyrystor - rozpoczynało przewodzenie, zaś podanie impulsu ujemnego - wyłączało tyrystor). Układy z tymi tyrystorami były lżejsze niż wcześniej stosowane. Dalszy rozwój energoelektryki umożliwił stosowanie tranzystorów dużej mocy. Są to tranzystory z izolowaną bramką (IGBT - Insulated Gate Bipolar Transistor). Układy z tymi tranzystorami charakteryzuje najmniejsza masa, jednocześnie występują mniejsze straty łączeniowe, a także dopuszczalne są wyższe częstotliwości pracy.
Rys.11 Schemat obwodu głównego trolejbusu ze sterowaniem impulsowym w trakcie rozruchu. Na szaro oznaczono elementy układu wykorzystywane podczas hamowania
Prąd płynie przez tyrystor (T1), uzwojenie stojana (L) wytwarzające pole magnetyczne, a później przez wirnik z komutarorem (S), w którym za sprawą oddziaływania na niego pola magnetycznego stojana powstaje moment obrotowy. Zasada działania układu jest więc zbliżona do sterowania oporowo-stycznikowego, przy czym główną różnicą jest sposób obniżania napięcia. Po przejściu przez wirnik prąd płynie przez dławik (Ld) do odbieraka i do przewodu ujemnego sieci trakcyjnej. Podczas otwarcia przerywacza (odłączenia układu od sieci zasilającej) prąd płynie w układzie uzwojenie stojana (L), wirnik z komutatorem (S), diodę (D) i dławik (Ld). Rolą dławika (Ld) jest wygładzanie napięcia podawanego na silnik.
Rys.12 Schemat obwodu głównego trolejbusu ze sterowaniem impulsowym w trakcie hamowania. Na szaro oznaczono elementy układu wykorzystywane podczas rozruchu
Prąd płynie przez wirnik w kierunku przeciwnym niż dla rozruchu, za sprawą zamiany przewodów wejściowych i wyjściowych z wirnika za pomocą styczników nawracających (SN), następnie przepływa przez dławik (Ld) i rezystor hamowania (RH), zamknięty stycznik hamowania (SH) i uzwojenie stojana. Ponieważ kierunek pola magnetycznego jest przeciwny do kierunku przepływu prądu przez wirnik w trakcie rozruchu, powstaje ujemny moment obrotowy i silnik zaczyna hamować. Tyrystor hamowania (TH) działa na zasadzie takiej jak tyrystor T1, z tą różnicą że jego rolą jest okresowe bocznikowanie części prądu przepływającego przez opornik hamowania (RH), czyli zmiana średniej wartości oporu, co w praktyce oznacza zmianę siły hamującej na silniku.


Fot.3 Jelcz 120MT (#804 MPK Lublin) - trolejbus ze sterowaniem impulsowym opartym na tyrystorach klasycznych
Pierwszy trolejbus z chopperem wprowadzono do eksploatacji w Szwajcarii w 1968 roku. Impulsowy układ rozruchowy zastosowano m.in. w typach takich jak: Jelcz PR110T (tyrystory klasyczne), Mercedes O405GTD (tyrystory GTO), Jelcz 120MTE (tranzystory IGBT), Solaris Trollino 12T (tranzystory IGBT), Jelcz M121E (tranzystory IGBT).

Rys.13 Ogólny schemat obwodu głównego trolejbusu ze sterowaniem impulsowym opartym na tranzystorach IGBT - widoczna analogia do układu z tyrystorami
3. Układ z falownikiem i silnikiem prądu zmiennego
Rys.14 Schemat ogólny trolebusu ze sterowaniem falownikowym
1- skrzynia dachowa z falownikiem i przetwornicą statyczną, 2- odbieraki prądu, 3- opornik hamowania, 4- sprężarka śrubowa, 5- portalowy most napędowy, 6- wał napędowy, 7- silnik asynchroniczny
Rozwój technologii półprzewodników oraz mikroelektroniki pozwolił na zbudowanie napędu z silnikami asynchronicznymi prądu zmiennego. Silnik asynchroniczny charakteryzuje się prostą budową, niezawodnością, łatwością produkcji i niewielką masą. Przy około 30% mniejszej masie otrzymuje się z niego taką samą moc, jak z analogicznego silnika prądu stałego. Dodatkowo, silnik asynchroniczny nie posiada komutatora ani zużywających się szczotek węglowych, przez co jego eksploatacja jest bezobsługowa. Te cechy zadecydowały o wprowadzeniu silników asynchronicznych do napędów pojazdów trakcji elektrycznej.
Silnik asynchroniczny to maszyna prądu zmiennego. W trakcji elektrycznej stosuje się silniki trójfazowe, czyli posiadające trzy fazy uzwojeń stojana. Rolą tych trzech faz uzwojeń jest wytworzenie wirującego kołowo pola magnetycznego. Wirnik w silnikach asynchronicznych nie jest bezpośrednio zasilany. Tworzy on jednak zamknięty obwód (Rys.15), a napięcie w nim jest indukowane poprzez wirujące pole magnetyczne. Stąd też silniki asynchroniczne nazywa się silnikami indukcyjnymi. Wirnik obraca się z prędkością mniejszą niż prędkość synchroniczna wirującego pola (z pewnym tzw. poślizgiem), stąd też wynika nazwa - asynchroniczny.
Rozwój technologii półprzewodników oraz mikroelektroniki pozwolił na zbudowanie napędu z silnikami asynchronicznymi prądu zmiennego. Silnik asynchroniczny charakteryzuje się prostą budową, niezawodnością, łatwością produkcji i niewielką masą. Przy około 30% mniejszej masie otrzymuje się z niego taką samą moc, jak z analogicznego silnika prądu stałego. Dodatkowo, silnik asynchroniczny nie posiada komutatora ani zużywających się szczotek węglowych, przez co jego eksploatacja jest bezobsługowa. Te cechy zadecydowały o wprowadzeniu silników asynchronicznych do napędów pojazdów trakcji elektrycznej.
Silnik asynchroniczny to maszyna prądu zmiennego. W trakcji elektrycznej stosuje się silniki trójfazowe, czyli posiadające trzy fazy uzwojeń stojana. Rolą tych trzech faz uzwojeń jest wytworzenie wirującego kołowo pola magnetycznego. Wirnik w silnikach asynchronicznych nie jest bezpośrednio zasilany. Tworzy on jednak zamknięty obwód (Rys.15), a napięcie w nim jest indukowane poprzez wirujące pole magnetyczne. Stąd też silniki asynchroniczne nazywa się silnikami indukcyjnymi. Wirnik obraca się z prędkością mniejszą niż prędkość synchroniczna wirującego pola (z pewnym tzw. poślizgiem), stąd też wynika nazwa - asynchroniczny.
Rys.15 Wirnik silnika asynchronicznego
1- pierścień zwierający pręty, 2- pręty aluminiowe
Podstawowe elementy silnika asynchronicznego to stojan, obudowa oraz wirnik w kształcie klatki, przedstawiony na Rys.15. Silnik przedstawiono na Rys. 16. Stojan (nr 8) składa się z trzech części, do każdej z nich jest podłączony jeden z trzech przewodów fazowych (3, 6). W przewodach uzwojenia stojana przepływa prąd o zmiennym przebiegu napięcia, który wytwarza zmienne pole magnetyczne (7). Pole to obraca się z tak zwaną prędkością synchroniczną. Linie sił pola przecinają pręty wirnika (2), wytwarzając w nim siłę elektromotoryczną, ta zaś z kolei wymusza przepływ ładunku w prętach. Pole magnetyczne uzwojenia zaczyna oddziaływać z polem elektrycznym wirnika i powstaje moment obrotowy (8). Wirnik obraca się prędkością mniejszą niż pole magnetyczne, gdyż inaczej pole nie byłoby zmienne w stosunku do prętów wirnika i doszłoby do zaniku momentu obrotowego. Tą różnicę prędkości nazywa się poślizgiem, z czego też wynika nazwa silnika: asynchroniczny. Prędkość obrotową silnika asynchronicznego można regulować poprzez zmianę amplitudy napięcia zasilającego i częstotliwości prądu w uzwojeniu stojana.
Rys.16 Przekrój silnika asynchronicznego
1- faza uzwojenia - dwa przewody leżące naprzeciw tworzą fazę, 2- wirnik, 3- przewód, + oznacza prąd płynący w kierunku od patrzącego, 4- stojan, 5- biegun południowy pola magnetycznego wytworzonego przez przepływający w uzwojeniach prąd, 6- przewód, kropka oznacza prąd płynący w kierunku ku patrzącemu, 7- linie sił pola magnetycznego, wytwarzanego przez uzwojenie, 8- moment siły elektrodynamicznej, działający na pręty wirnika, 9- biegun północny pola magnetycznego, 10- kierunek obrotu wirującego pola magnetycznego
Standardowym systemem zasilania w elektrycznym transporcie miejskim jest 600V prądu stałego, dlatego dla zastosowania silników prądu zmiennego niezbędnym jest wykorzystanie urządzenia, przekształcającego prąd stały na prąd zmienny - falownika. Współczesne trójfazowe falowniki, sterowane mikroprocesorowo, pozwalają na uzyskanie na wyjściu napięcia o regulowanej amplitudzie i częstotliwości.

Standardowym systemem zasilania w elektrycznym transporcie miejskim jest 600V prądu stałego, dlatego dla zastosowania silników prądu zmiennego niezbędnym jest wykorzystanie urządzenia, przekształcającego prąd stały na prąd zmienny - falownika. Współczesne trójfazowe falowniki, sterowane mikroprocesorowo, pozwalają na uzyskanie na wyjściu napięcia o regulowanej amplitudzie i częstotliwości.
Rys.17 Ogólny schemat falownika trolejbusu ze sterowaniem falownikowym
Tranzystory T1-T6 służą do odpowiedniego kształtowania przebiegu prądów i napięć w uzwojeniach stojana, co ma na celu wytworzenie wirującego pola magnetycznego. Ich sterowanie jest skomplikowane i wymaga złożonych sterowników obsługujących złożone tryby modulacji. Opanowanie technologii sterowania pracą falownika wymagało wiele czasu, stąd też pomimo pierwszych prób pod koniec lat 70-tych XX wieku napędy asynchroniczne stały się standardem dopiero w latach 90-tych XX wieku.
Przekształtnik energii może być umieszczony na dachu, z czego często korzystają producenci pojazdów, zwiększając obszar niskiej podłogi. Podstawowe zalety napędu asynchronicznego to cicha praca, płynny rozruch i hamowanie, skuteczne hamowanie silnikiem, a także możliwość odzysku energii hamowania, która może być zwrócona do sieci zasilającej.
Przekształtnik energii może być umieszczony na dachu, z czego często korzystają producenci pojazdów, zwiększając obszar niskiej podłogi. Podstawowe zalety napędu asynchronicznego to cicha praca, płynny rozruch i hamowanie, skuteczne hamowanie silnikiem, a także możliwość odzysku energii hamowania, która może być zwrócona do sieci zasilającej.

Fot.4 Solaris Trollino 12AC (#3033 PKT Gdynia) - trolejbus ze sterowaniem falownikowym
Sterowanie falownikowe występuje w trolejbusach typów: Solaris Trollino 12AC, Solaris Trollino 12M, Skoda 21Tr, Neoplan N6216, Hess lighTram3. Polscy producenci falownikowych układów sterowania to Medcom, Enika i IEL w Międzylesiu.